
山东合运电气有限公司
建筑智能化/消防一体化专业生产厂家
客户统一服务热线
400-088-6921
155-8888-6921
400-088-6921
155-8888-6921

矢量控制(vector control)也称为磁场导向控制(field-oriented control,简称FOC),是一种利用变频器(VFD)控制三相交流电机的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制电机的输出。其特性是可以个别控制电机的的磁场及转矩,类似他激式直流电机的特性。由于处理时会将三相输出电流及电压以矢量来表示,因此称为矢量控制。
矢量控制可以适用在交流感应电机及直流无刷电机,早期开发的目的为了高性能的电机应用,可以在整个频率范围内运转、电机零速时可以输出额定转矩、且可以快速的加减速。不过相较于直流电机,矢量控制可配合交流电机使用,电机体积小,成本及能耗都较低,因此开始受到产业界的关注。矢量控制除了用在高性能的电机应用场合外,也已用在一些家电的应用中。
达姆施塔特工业大学的K.Hasse及西门子公司的F.Blaschke分别在1968年及1970年代初期提出矢量控制的概念。Hasse提出的是间接矢量控制,Blaschke提出的是直接矢量控制。布伦瑞克工业大学的维尔纳·莱昂哈德(Werner Leonhard)进一步开发磁场导向控制的控术,因此交流电机驱动器开始有机会取代直流电机驱动器。
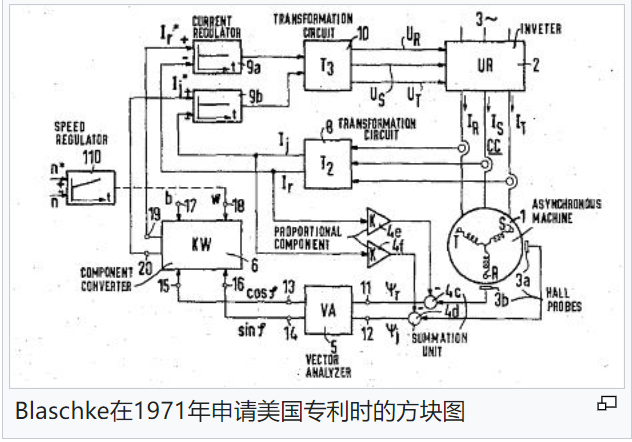
当时微处理器尚未商品化,但已经出现泛用的交流电机驱动器:p.605。当时相较于直流电机驱动器,交流电机驱动器的成本高、架构复杂,而且不易维护.而当时的矢量控制需要许多传感器及放大器等元件,因此无法将矢量控制应用在交流电机驱动器中。
派克变换一直被用在同步电机及感应电机的分析及研究,是了解磁场导向控制最需要知道的概念。这个概念是罗伯特·派克(Robert Park)在1929年的论文中提出的[9]。派克变换被列为二十世纪发表电力电子相关论文中,第二重要的论文。派克变换的重要性是可以将电机有关的微分方程,由变系数微分方程变成“非时变”系数的微分方程。
利用矢量控制,可以用类似控制他激直流电机的方式控制交流感应电机及同步电机。在他激直流电机中,磁场电流及电枢电流可独立控制,在矢量控制,控制磁场及电枢的电流互相垂直,理论上不会互相影响,因此当控制转矩时,不会影响产生磁场的磁链,因此可以有快速的转矩响应。
矢量控制会依照程式中计算的电流矢量,产生三相PWM的电压提供给电机,目的是要控制电机的三相电流。其中会将电流及电压等物理量在二个系统之间转换,一个是随速度及时间改变的三相系统,另一个则是二轴非线变的旋转坐标系统。
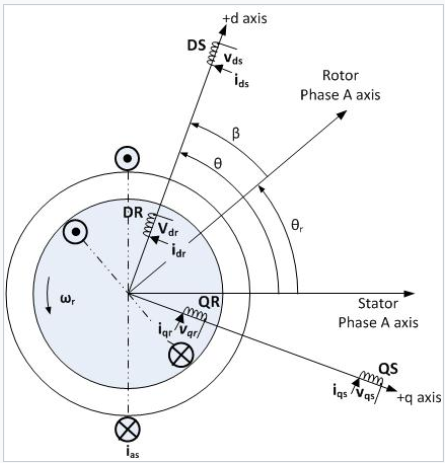
坐标转换及坐标系
定子电流的矢量可以用(d,q)轴的坐标系统来定义,其中场磁链的电流分量对正d轴(direct),而转矩的电流分量对正q轴(quadrature)。电机的(d,q)轴坐标可以对应(a,b,c)三相的弦波系统。而(d,q)轴的电流矢量一般可以个别用PI控制器进行控制,也就是没有微分(D)单元的PID控制器。
和(d,q)轴的坐标系统有关的坐标转换如下:
由三相的瞬时电流值转换为(a,b,c)三相的弦波电流矢量。
利用克拉克转换,由(a,b,c)三相转换到({\displaystyle\alpha}\alpha,{\displaystyle\beta}\beta)二相的转换。在实现矢量控制时一般假设电机没有接地,且三相电流平衡,因此可以只感测三相电流中的二相。({\displaystyle\alpha}\alpha,{\displaystyle\beta}\beta)二相的坐标互相垂直,{\displaystyle\alpha}\alpha轴对齐(a,b,c)三相中的a相。将({\displaystyle\alpha}\alpha,{\displaystyle\beta}\beta)二相转换到(a,b,c)三相的转换则会利用空间矢量PWM或是反克拉克转换来达成。
在({\displaystyle\alpha}\alpha,{\displaystyle\beta}\beta)和(d,q)之间,二个二相系统之间的转换,利用派克转换及反派克转换来达成。
不过也有些系统会直接进行(a,b,c)三相系统及(d,q)轴坐标系统之间的转换及反转换。
(d,q)轴的坐标系统可以依任何转速旋转,在实务上可以选择以下三种不同转速的坐标系统:
静止坐标系统,(d,q)轴不会旋转。
同步坐标系统,(d,q)轴以同步转速旋转。
转子坐标系统,(d,q)轴以转子的转速旋转,感应电机的转子转速会和同步转速不同。
应用微处理器及数字信号处理器
利用电机控制的算法,可以从三相的瞬时电流中得到独立的转矩电流及场电流。简单的交流电机控制可以利用以微处理器为基础的控制系统来达成.高阶的交流变频器则会应用数字信号处理器(DSP)来进行。
无传感器矢量控制
矢量控制可以用有编码器反馈转速的闭环磁场导向控制来实现,也可以用无(速度)传感器(sensorless)的开环控制器来实现。无传感器矢量控制和闭环控制器的最大差异是可以输出额定转矩的最小速度。闭环矢量控制可以在电机静止时输出额定转矩,而无传感器矢量控制一般有其最小速度的限制,例如0.8Hz。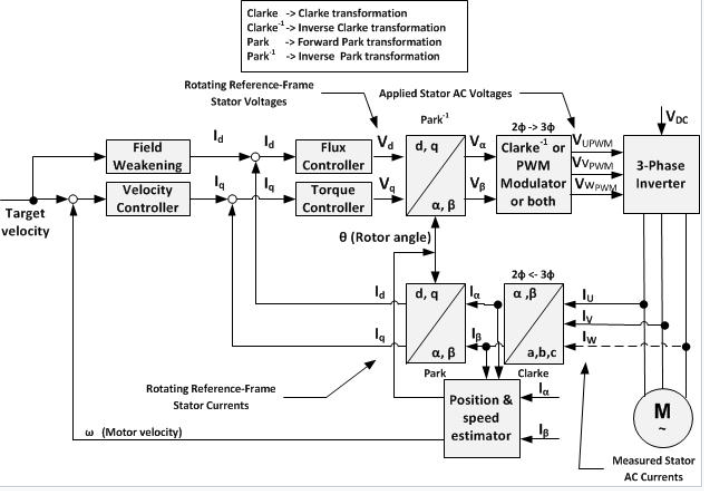
无传感器矢量控制是利用三相电压及输出电流,配合开环的估测器(estimator)或是闭环的观测器(observer)来得到转速的信息,开环估测器中会计算转速,但不会作反馈控制,闭环观测器则会计算转速,并依此计算某物理量,利用此计算量计算值和矢量控制中对应值的差异进行反馈控制。无传感器矢量控制由于不需要有加装编码器的电机,在成本及可靠度上很有竞争力,但对于电流信号的要求也比较高。
直接及间接磁场导向
磁场导向控制可分为二种:分别是直接磁场导向控制(DFOC,也称为回馈磁场导向控制)及间接磁场导向控制(IFOC,也称为前馈磁场导向控制)。间接磁场导向控制可以在从零速到高于电机额定频率以上的弱磁区运作,因此较常使用。
直接磁场导向控制中,利用电压型或电流型的磁通模型计算磁通大小及角度。在间接磁场导向控制中会先量测定子电流及转子速度,再利用转子速度及转差率的计算值推导转子角度,再得到磁通的角度。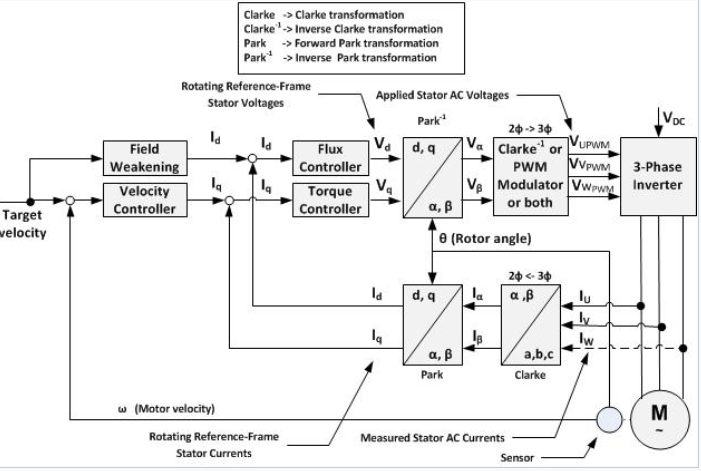
需要量测(或是估测)电机的速度或位置,若估测电机的速度,需要电机电阻及电感等参数,若可能要配合多种不同的电机使用,需要自动调适(autotuning)程序来量测电机参数。
借由调整控制的目标值,转矩及磁通可以快速变化,一般可以在5-10毫秒内完成。
若只使用PI控制,步阶响应会有过冲。
功率半导体的切换频率(载波)一般为定值。
转矩的精确度和控制系统中使用的电机参数有关,因此若因为电机温度变化.造成转子电阻阻值提高.会造成误差的变大。
对处理器效能的要求较高,至少每一毫秒需执行一次电机控制的算法。
变频器除了使用矢量控制外,另一种常用的技术是标量型的V/f控制,事先建好不同频率下对应电压的数据,变频器的输出电压则依当时频率查表(V/f曲线)而得。相较于V/f控制,矢量控制需要有电机电流、实际转速等信号,架构较复杂,但控制性能也较V/f控制要好。
直接转矩控制是另一种电机控制的技术。相较于直接转矩控制,矢量控制的架构较要复杂,但其计算不需那么频繁,而且对电流传感器的要求也比较低。矢量控制在处理器及周边电路的成本较低,比较适用在一些不需要用到直接转矩控制高性能的应用场合,
 微信
微信